The invention aims to create a controlled unpowered mechanical device designed to assist individuals with gait impairments—specifically targeting the heel-off phase of the stance period in walking. The device consists of a torsion spring, a locking mechanism, and a shoe- mounted structure that together store and release energy without the use of sensors or powered components. Its design is to engage only during a specific phase of the gait cycle using a rope-actuated lock, providing mechanical assistance when most needed, while allowing free movement in other phases. The design is lightweight, modular, and can be attached to a regular shoe, making it a potentially cost-effective and accessible aid for gait rehabilitation.
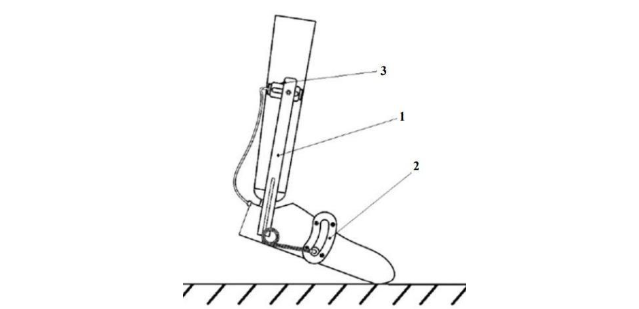
Figure (1) Schematic of the device showing key components — (1) Torsion Spring Assembly, (2) Horizontal Channel Assembly, (3) Locking Mechanism Assembly.
Many older adults experience difficulties with walking due to reduced muscle strength and age-related impairments in motor control. These individuals often require only minimal assistance, making simple mechanical support devices both practical and effective.
Many individuals suffer from gait abnormalities due to various conditions such as stroke, cerebral palsy, multiple sclerosis, spinal cord injuries, and other neurological or orthopedic impairments. These conditions can result in difficulties with walking, including poor balance, reduced walking speed, and increased risk of falls. While individuals with severe neurological conditions may require powered assistance, this device may benefit those with mild to moderate impairments, particularly those who struggle with the "heel-off" phase of the gait cycle. Traditional gait-assisting devices, such as passive orthoses, often provide limited support and lack the adaptability required for dynamic movements. Fully powered devices are bulky, expensive, and rely on batteries and sensors. A simpler, unpowered mechanical device with targeted phase-specific assistance offers a valuable alternative.
- Phase-Specific Mechanical Engagement: The device design uses a locking mechanism controlled by a rope to engage a torsion spring only during the heel-off phase of the gait cycle—assisting movement precisely when required.
- No Power or Sensors Required: It aims to operate without motors, batteries, or sensors by leveraging natural body movements to trigger the mechanism, reducing complexity and cost.
- Compact and Modular Design: The device is being designed to mount directly onto the user’s own shoe and calf using adjustable straps, eliminating the need for a custom brace or full exoskeleton.
- Energy Storage and Release via Torsion Spring: A torsion spring stores energy during mid-stance as the tibia moves forward and releases it during heel-off, providing assistive torque to aid foot lift.
The prototype is under development.
The technology has been conceptualized and is in the development stage.
1
This device presents a potentially low-cost solution for gait assistance, as it operates without electronics, sensors, or external power—making it more accessible than powered systems. It introduces a novel, mechanical approach to phase-specific assistance using a passive spring and locking mechanism, which can contribute to innovation in orthotic design. Additionally, the device holds value in educational and research settings as a prototype to explore and evaluate principles of mechanical gait support and future improvements in assistive mobility technologies.
Healthcare and Rehabilitation, Medical Devices, Assistive Technology, Biomechanics Research
- Orthotic Design Research: Useful as a design concept for exploring mechanical, non-powered approaches to gait assistance.
- Educational Demonstrations: Can be employed in academic settings to study phase-specific gait mechanics and passive assistive technologies.
- Rehabilitation Technology Innovation: May contribute to the design of lightweight, power-free solutions for walking assistance in resource-limited contexts, pending further development and validation.
Geography of IP
Type of IP
202121023832
532535