This invention introduces a method and trajectory management controller for constrained trajectory optimization by reformulating an optimal control problem (OCP) into a finite-dimensional nonlinear programming (NLP) problem. Using a quasi- interpolation-based direct collocation method, it ensures uniform convergence between the actual and approximated control trajectories. The approach simplifies the computational burden and supports robust performance across various real-time, constrained environments. It provides flexibility via user-defined parameters and is suitable for implementation across robotics, guidance, and automation sectors.
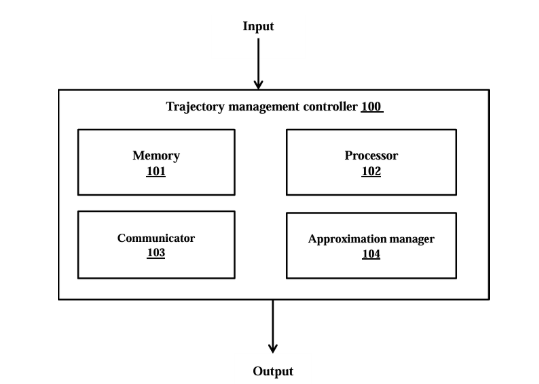
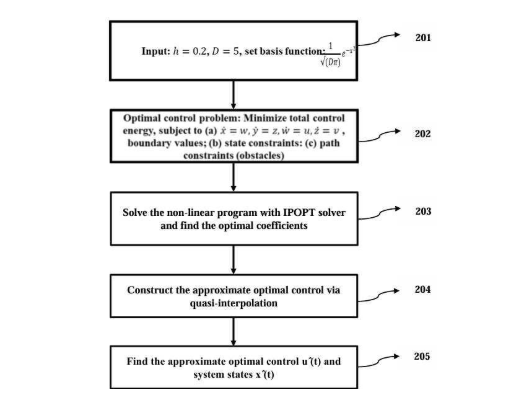
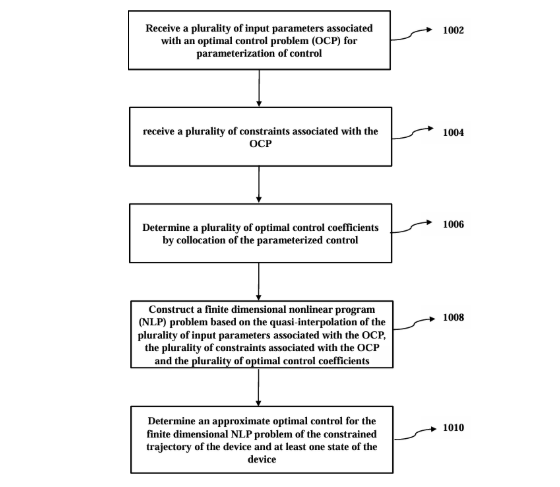
Figure (1) illustrates trajectory management controller for constrained trajectory optimization; (2) Image is the flowchart illustrating an example of the robot obstacle avoidance problem according to the embodiments as disclosed herein; (3) It is the flowchart illustrating the method for constrained trajectory optimization, according to the embodiments as disclosed herein.
Optimal control problems (OCPs), which aim to find the best control trajectories for nonlinear time-varying systems under constraints, are inherently infinite- dimensional and computationally demanding. Most current methods approximate solutions only locally or within specific time intervals, lacking uniform accuracy. Moreover, they often require complex computations or do not scale well. There is a need for a method that simplifies this search using a finite-dimensional approach while ensuring guaranteed and uniform approximation over time for constrained systems such as in robotics, autonomous navigation, and process control.
- Decreased burden of search: The approximation of the OCP using a collocation process reduces the search space to a finite dimensional vector field which can easily be processed using any nonlinear program.
- Guaranteed uniform approximation: The approximated and the actual optimal trajectory are within a user-defined interval of each other uniformly over time.
- Control over the trajectory shape: Two user-defined parameters are present in the quasi-interpolation engine which helps with the collocation process of the OCP into a solvable nonlinear programming problem, giving control of the trajectory to the user
The prototype has been implemented as a simulation framework written in Python and MATLAB, integrating quasi-interpolation collocation schemes with control parameter tunability. Simulations include test cases such as robot path planning with state and control constraints. The framework supports modular input parameters and is equipped to interface with standard nonlinear programming solvers for real-time trajectory generation.
The method has been developed and demonstrated using simulation studies involving constrained path planning scenarios such as obstacle avoidance for robotic agents and autonomous systems. The algorithm has been validated through numerical results on standard benchmark OCPs and is compatible with commonly used global NLP solvers. It is ready for software integration and adaptation to practical embedded systems in research or industrial automation environments.
5
This technology empowers engineers and system designers with an efficient and uniform trajectory planning tool for complex systems. By reducing computational complexity and enabling better control over constrained systems, it facilitates safer, more reliable operation in autonomous navigation, robotics, and industrial processes. It contributes to the advancement of intelligent systems while promoting energy efficiency and reducing design and deployment time for smart automation applications.
- Robotic Path Planning: Generates safe and optimal trajectories for autonomous robots under motion constraints.
- Autonomous Vehicle Navigation: Enables smooth and feasible maneuver planning in dynamic, constrained driving environments.
- Chemical and Industrial Process Control: Optimizes constrained control inputs in real-time process plants with nonlinear dynamics.
- Aerospace & Defense Guidance: Provides reliable trajectory computation for UAVs, drones, and underwater vehicles with safety constraints.
Geography of IP
Type of IP
202221040362
430622