The development of a gearless spherical robot addresses the limitations of traditional wheeled and legged robots in scenarios involving collisions with the ground or other objects while throwing or maneuvering. This innovation introduces a dual-pendulum mechanism that enhances stability, maneuverability, and robustness, while eliminating the vulnerabilities associated with gears. The robot's unique design allows it to be throwable, with a protective hull that shields internal components from environmental hazards. Featuring a compact form, precise control, and dynamic stability achieved through an optimized ratio of moments of inertia, the robot supports autonomous, semi-autonomous, and remote-controlled operations. It is designed for diverse applications, including security, planetary exploration, surveillance, environmental monitoring, and search & rescue, ensuring reliable performance in challenging terrains.
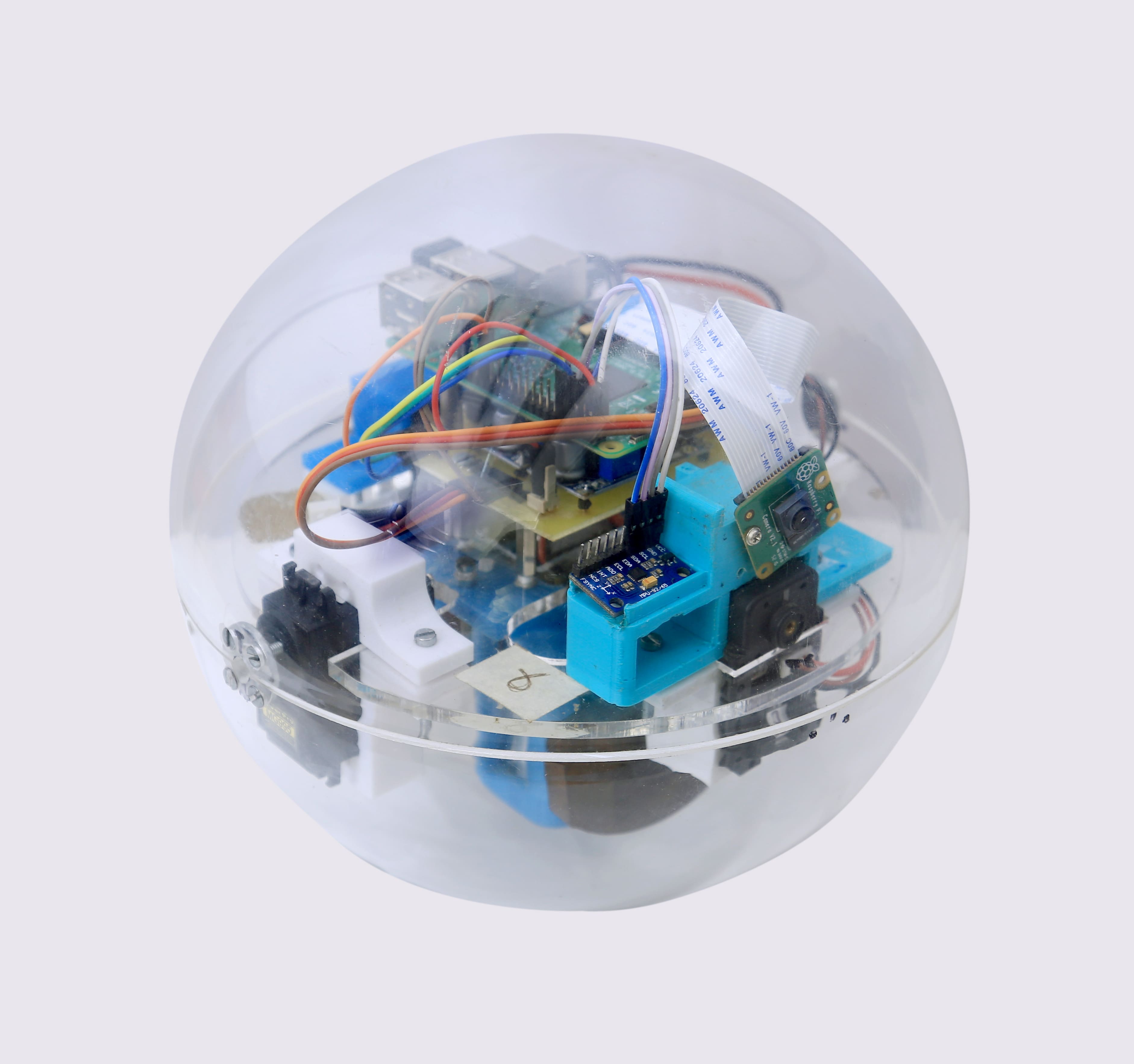
Figure 1. Spherical robot (Isometric View)
Traditional robots, such as wheeled and legged designs, face significant limitations when it comes to maintaining stability and operational readiness after impacts, especially in scenarios involving room interventions. These robots are prone to toppling over and can only initialize from a specific orientation, such as with their legs or wheels downwards.
Existing spherical robots, often reliant on gears and single-pendulum mechanisms, face issues like gear misalignment and poor recovery from collisions. The challenge is to create a compact, robust, and efficient spherical robot that can operate reliably in rugged terrains, is throwable, with stable steering, low maintenance, and versatile operational modes, for applications in security, exploration, and surveillance.
- Gearless Design: This innovation avoids gear-related issues, enhancing performance in rough environments.
- Dual-Pendulum Mechanism: The unique shape of the pendulums increases the ratio of moments of inertia, allowing for precise control, dynamic stability, and improved maneuverability, while eliminating the need for gears that can fail in harsh environments.
- Throwable: It has a compact design with a polycarbonate hull that houses all electronics within the protective hull. This enables the robot to be throwable and withstand impacts even if it falls from a height or is thrown through obstructions.
- Compact and Miniaturized: The compact design allows for a smaller robot size without compromising functionality.
- Robust Construction: The spherical hull protects internal components from environmental factors like dust, chemicals, and water.
- Versatile Operation Modes: It supports autonomous, semi-autonomous, and remote-controlled operations.
- Dynamic Stability: It has higher dynamic stability – enhanced by the special shape of the pendulums, increasing the ratio of moments of inertia.
The gearless spherical robot prototype features a robust design with a protective hull (190 mm diameter, 3-4 mm thickness). It includes dual mild-steel pendulums (193 grams each), a 5 mm thick acrylic yoke plate, Hitec HS-225MG servo motors for rolling, and Dynamixel AX-12 digital servos for pendulum motion. Powered by a 1300 mAh, 7.4V LiPo battery, it uses an Arduino Uno microcontroller for control, and an Xbee transceiver for wireless communication. The design ensures durability and stability, suitable for rugged environments.
The functionality and all major elements of end use, with remote controlled operation, has been achieved, along with the GUI development.
5
This technology has potential applications in various fields, including security, planetary exploration, and surveillance, improving efficiency and safety in operations performed in harsh and inaccessible environments.
- Security and Surveillance: Room intervention problems where the robot can be thrown, or rolled
- Space Exploration: Maneuvering on planetary surfaces with harsh and inaccessible environments, which the robot can endure and operate in owing to its protective shield
- Environmental Monitoring: Data collection in remote and difficult-to-reach areas
Geography of IP
Type of IP
4717/MUM/2015
501072