The invention pertains to a spatial parallelogram mechanism designed to facilitate movements in space without altering orientation. This mechanism features four binary links forming a parallelogram, with connecting links at each corner to enable the desired movement. This setup is highly efficient and versatile, applicable in various fields such as robotics and material handling.
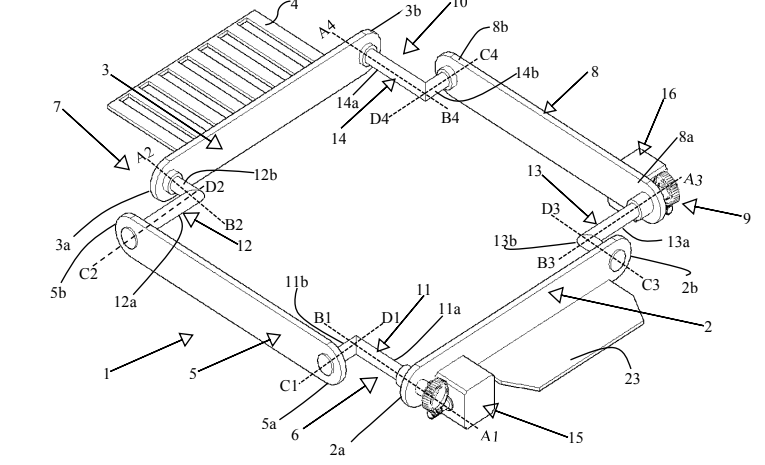
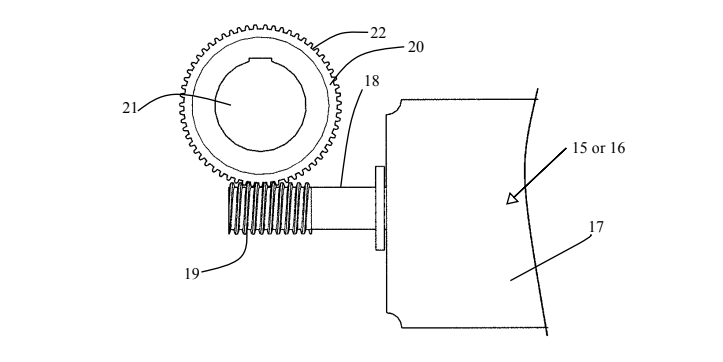
Figure (1) An isometric view of a spatial parallelogram mechanism; (2) A view of a rotary actuator of the parallelogram mechanism of Fig 1
Existing linkage mechanisms for robotic and material handling applications often comprise multiple actuators, leading to complex, bulky, and costly designs. These mechanisms typically have low workspace to footprint ratios, making them inefficient in terms of space utilization and maneuverability. Additionally, the complexity of these mechanisms makes their control and maintenance challenging, resulting in higher operational costs.
- Simplified design: This innovation has fewer components and actuators, which leads to a more streamlined and cost-effective mechanism.
- Spatial parallelogram configuration: The design features four binary links forming a parallelogram, with connective links at each corner allowing for movement without orientation change.
- Enhanced workspace to footprint ratio: It offers improved efficiency and maneuverability in confined spaces.
- Durability: The reduced wear and tear on components enhances the longevity and reliability of the mechanism.
- Versatility: It is applicable in various fields, from robotics to material handling, without requiring significant modifications.
NA
Theoretical concepts for this technology have been proven/validated through calculations/simulations.
1
The invention offers significant benefits in fields such as robotics and industrial automation, where space efficiency and precise movement are crucial. By reducing the complexity and cost of linkage mechanisms, the technology can enhance productivity and operational efficiency in various sectors, ultimately leading to broader societal advancements in automation and manufacturing.
- Robotics: Precise movement control without orientation change
- Material handling: Efficient handling of objects in confined spaces
- Industrial automation: Improved maneuverability and space utilization in automated systems
- Aerospace: Potential applications in space exploration where precise movement control is crucial
Geography of IP
Type of IP
201721020997
495372