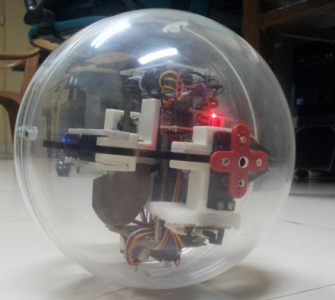
■ The robot, which is completely covered, can maneuver in any direction
■ Design is based on pendulum and yoke assembly
■ Entire electronics is within a spherical shell
■The gearless design supports jerky movements so that the application is not limited to a planar environment
■ Each part inside the shell moves when the robot moves. Major challenges such as placement of electronic and mechanical components for weight balance and non winding of wire during the movement, were addressed
■ Two-pendulum design is developed to avoid gears in the assembly
■ Controller using position measurements is designed for autonomous navigation of the spherical robot from a given source and target position using position measurements
■ Outdoor experiments using GPS measurements are performed using this controller.
Prof. Leena Vachhani