While digital imaging has taken the world by storm, there are many trying situations when it is quite difficult to take pictures from a smartphone or a handheld camera. One of the scenarios where we may consider using a drone for imaging is to capture a panorama of an extensive building, or when an inspector wants to examine defects in, say, the iconic Worli Sea Bridge.
While panoramic mosaicing is a ‘solved’ problem, a research problem arises if there are gaps in the data e.g. with very few ‘features’ between the steel girders (only the sky or the horizon is seen). Existing panoramic mosaicing techniques fail. In our work, we focus on methods to construct panoramas from the scenes captured through quadcopter having significant regions of vacant spaces.
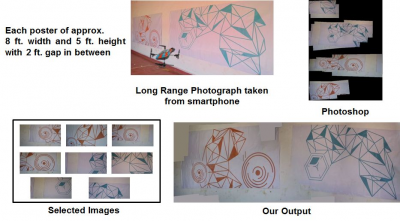
First, the captured video contain a large number of image-these are summarised by our algorithm to get a small set of image that will encompass the complete scene under intrest. Thse image when placed at proper position using using the IMU (Inertial
Measurement Unit) data present on the quadcopter
will provide a final mosaic. We demonstrate the
when an inspector wants to examine defects in,
efficacy of our approach on a number of inputsequences that cannot be mosaiced by existing methods.
A big problem with current day devices is power. Existing Due to limitation of battery and time required to cover scene in detail, we may not be able to image large scenes using just a single quadcopter. In such cases we use multiple quadcopters that image large scene collaboratively. We divide the scene in multiple parts and each part may be covered by one quadcopter. In this scenario every quadcopter should identify every other quadcopter in reliable manner. This can be achieved by placing fiducials on quadcopters. Fiducials are commonly placed in environments to provide a uniquely identifiable object in the scene. But, current fiducials such as ARTag (https://en.wikipedia.org/wiki/ARTag) are not designed to handle blur which is introduced due to jerky motion of inexpensive are we have designed blur resilient fiducials. so not only each quadcopter can identify other quadcopter can identify other quadcopters,one may even instruct each quadcopter according to code embedded in the fiducial on it.
While imaging for personal consumption or inspection has it is uses we also considered an important public health issue.In recent times, there has been a sharp increase in dengue and maleria, especially in urban area. One of the major reasons for this health hazard is the number of locations where one can find stagnant water ((‘chajjas’ and split ACs make a potent combination in hot areas,and there’s plenty of water during the rainy season!)These location are large breeding grount for fast multiplying mosquitoes, and other insects. Other areas include traditionally uncovered gutters, and uncovered of high rise building aera that are hard to reach and acsses. we propose the use of a quadcopter to inspect areas and identify stagnant water patches using a novel technique based on optical flow.
Prof. S Chandran